take up – bell crank lever
¶ ミシンは手縫いから発展しています。その工程は針で2枚の生地に糸を通して合わせ、糸を締めて固定する。この一連の作業のうちの糸を締める工程が ” take up” になります。革製品の手縫をされている様子をイメージしてもらえればその両手の糸を引っ張っている仕草です。ミシンはそういった作業を機械的なメカニズムで再現しています。現代の高速型ミシンでは省略されていった“糸入れと糸締工程のタイミングを分ける”(スピードを上げるには組み込めない機構)仕組みです。
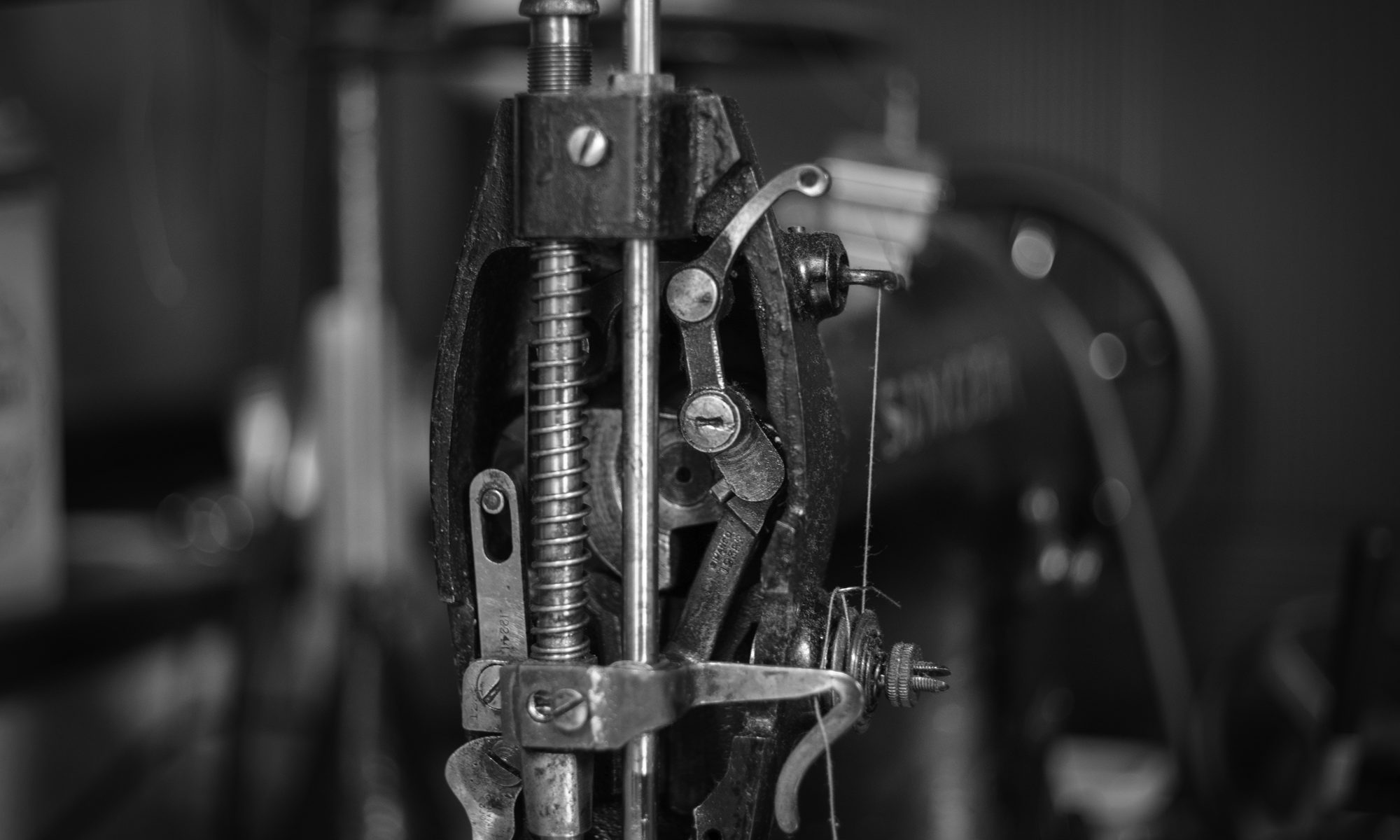
¶ 初期のシンガーのロックステッチ(本縫い)ミシン(class 31,44を含む)の糸繰り(take up lever)はベルクランク機構を使った糸締のタイミングを操作する機能があります。これは1891年にシンガー社のPHILIP DIEHLさんが取得している特許(US462398)がうまく説明されていますのでこれに沿って解説します。
¶ 糸締レバーをベルクランクレバーの形に構成し、機械の固定部分に接続されたリンク(k)に取り付け、回転するクランクピン(e)によって操作することにより、糸締レバーの運動が得られます。 これは、それが運動するリンク(k)の揺動端とともにレバーが上下に動き、また、前記リンクとの枢軸接続部で振動するという独特の動きである。 この構造と部品配置の結果、レバーの糸締アーム(k’)は、動作中のクランクピンの回転の約4分の3の間ゆっくりと下降し、その後、残りの約4分の1回転の間に急速に上昇します。
¶ Fig.1は糸締アーム(k’)が最上部にある状態を表しており、Fig.1の位置からFig.3の位置までクランクピン(e)がほぼ半回転する間に糸締アーム(k’)は下降します。 Fig.3 は、糸締を操作するクランクピン(e)が低い位置にあることを示しており、その点からクランクピン(e)は上方に移動し始めますが、その際に糸締アーム(k’)がリンクとの中央の枢動接続部で振動します。 したがって、動作中のクランクピン(e)が上昇し始めている間、糸締アーム(k’)はFig.2 に示す位置に到達するまで下降し続けます。次の4分の1回転の間、またはFig.12に示す位置と Fig.2からFig.1に示すものと比較すると、糸締アーム(k’)は一体的に上方に移動し、その枢軸を中心に振動するため、リンク(kによる上方への移動は約1/3の時間で完了する。 降下中、または作動中のクランクピン(e)が約4分の1 回転する間、この運動が行われます。 この結果、天秤(糸締)を適切なタイミングで操作することができ、針棒が下降している間と釜が上糸のループを通過している間、ゆっくりと糸が繰り出されます。 その後、針の穴が再び布地に入る前に、素早く巻き取り動作を実行してステッチを締めます。 また、縫い目を締める瞬間に、天秤を操作するクランクピンが回転する円の上部と、天秤の下アームの上を通過するような位置関係になっています。 上はほぼ垂直です。 したがって、この瞬間、糸締はリンク(k)との枢動接続で振動しており、それによって強力なてこの作用が得られ、機械の作動部分に負担をかけずに糸を引っ張る所望の強さが与えられる。
¶ 以上がベルクランクを使った糸締機構の概要です、具体的な動作が見たい方は私のインスタグラム(rebuilt.jp)の方で私の”SINGER 44 ミシン”で公開していますのでご覧ください。
¶ 高速化、近代化により効率よくものが作れるようになりましたが、新しいものが技術の全てをカバーしているのではなく使用者が重きを置いているものが省略されてしまう場合もあります。私の縫う製品( LB denim など)ではなるべくこういった初期の縫い目(手縫を手本にしている)が出るミシンを使っています。